03. Courses
03 SF Courses V1
Courses
Four courses comprise the Sensor Fusion Engineer Nanodegree Program.
- Lidar
- Camera
- Radar
- Kalman Filters
The first three courses focus on different sensor modalities , and the final course focuses on how to fuse together data from these different sensors to develop a synthesized understanding of the world.
Lidar
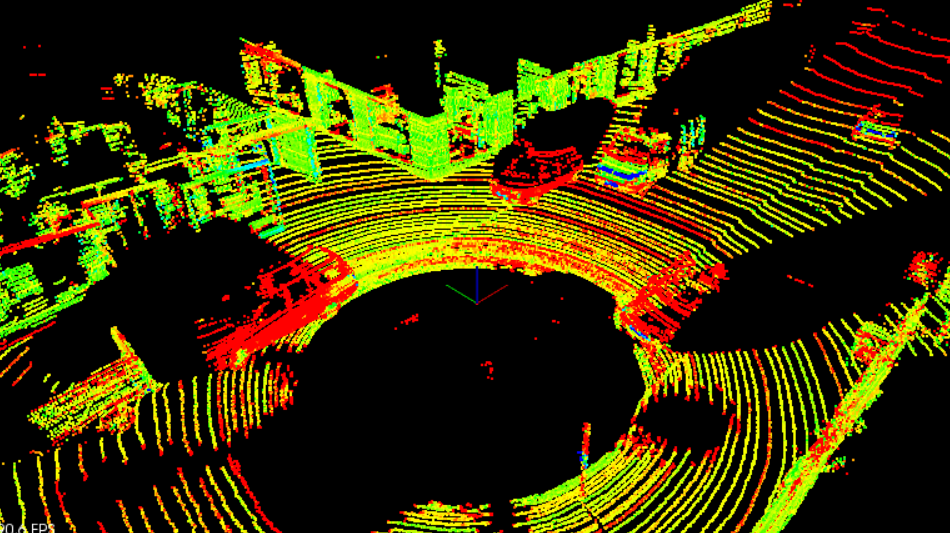
Process raw lidar data with filtering, segmentation, and clustering to detect other vehicles on the road. Understand how to implement Ransac with planar model fitting to segment point clouds. Also implement Euclidean clustering with a KD-Tree to cluster and distinguish vehicles and obstacles.
Camera

Fuse camera images together with lidar point cloud data. Extract object features from camera images in order to estimate object motion and orientation. Classify objects from camera images in order to apply a motion model. Project the camera image into three dimensions. Fuse this projection into three dimensions to fuse with lidar data.
Radar
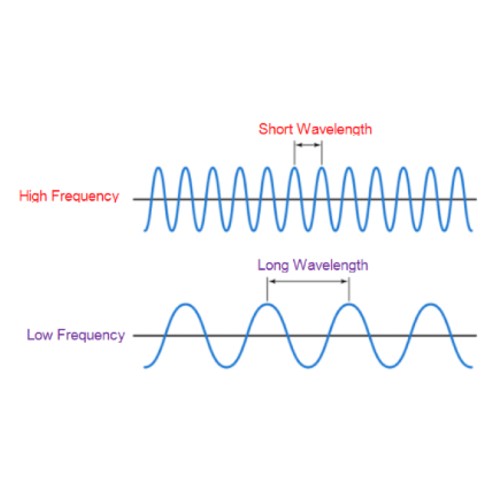
Analyze radar signatures to detect and track objects. Calculate velocity and orientation by correcting for radial velocity distortions, noise, and occlusions. Apply thresholds to identify and eliminate false positives. Filter data to track moving objects over time.
Kalman Filters
Fuse data from multiple sources using Kalman filters. Merge data together using the prediction-update cycle of Kalman filters, which accurately track object moving along straight lines. Then build extended and unscented Kalman filters for tracking nonlinear movement.